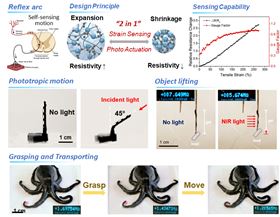
 The design principle of the self-sensing hydrogel actuator and photos of the resulting motion, object lifting and grasping and transporting actions.
The design principle of the self-sensing hydrogel actuator and photos of the resulting motion, object lifting and grasping and transporting actions.A new heat- and light-responsive polymeric material could prove useful for soft robots that mimic the function and movement of living organisms, according to researchers at the University of California Los Angeles (UCLA), Arizona State University, and University of Arizona College of Medicine-Phoenix [Lo et al., Materials Today (2021), https://doi.org/10.1016/j.mattod.2021.05.008].
“We designed and created a biological sensory motor-like material that can act as a sensor and an actuator simultaneously,” explains Ximin He of UCLA, who led the work. “This active material’s motion can be powered and controlled remotely by light and, simultaneously, be monitored in real-time by its own inherent sensing function.”
Conventional robots require motors to drive movement and motion sensors or cameras to provide monitoring and feedback on their surroundings. But these electronic systems are bulky, limiting the range of motion and potential miniaturization. To get around these problems, He and her team designed hydrogels that combine actuation and strain sensing in a single muscle-like material. These easy-to-make materials, which can be cured into various shapes or printed into complex structures, consist of polymer network meshes with water trapped inside.
“Soft like biological tissues, [hydrogels] can be chemically designed to swell or shrink volumetrically upon environmental stimuli such as heat, light, or specific chemical or biological molecules,” points out He.
She harnessed this property to create self-sensing actuating materials from a light-absorbing conductive polymer, polypyrrole, incorporated into a heat-responsive hydrogel, poly(N-isopropylacrylamide). The conductive polymer provides the sensing function, based on ion-induced electrical conductivity changes as the material is deformed, and transforms light into heat, while the other component changes volume in response to enable actuation.
“[Since] the sensing component is incorporated with the actuation component at molecular level, this design can avoid the adhesion and locomotion interruption problems that arise from attaching sensors and applying stimulus to an actuator,” says He.
The resulting material absorbs light, which is transformed to heat, inducing shrinking at high temperature and swelling during cooling. With the right geometry and light manipulation, the heat-induced shrinking and swelling process can produce locomotion and other actions like lifting or gripping.
“[Our] soft robot deforms with infinite degrees-of-freedom and can be remotely controlled and powered,” says He. “It could be used for underwater applications, in constrained environments or extreme conditions,” she adds.
The response time of the material is limited by the diffusion rate of water, so the system is currently limited to the centimeter scale. The team are now engineering the micro- and nanostructure of the hydrogel to improve the response rate, as well as flexibility and robustness.